Full-Body Motion Planning
for Locomotion on Uneven Terrain
Presented by
Henrique Ferrolho
Supervision
Professor Rosaldo Rossetti, University of Porto
Professor Sethu Vijayakumar, University of Edinburgh
Mars
The ultimate goal
Agenda
Introduction
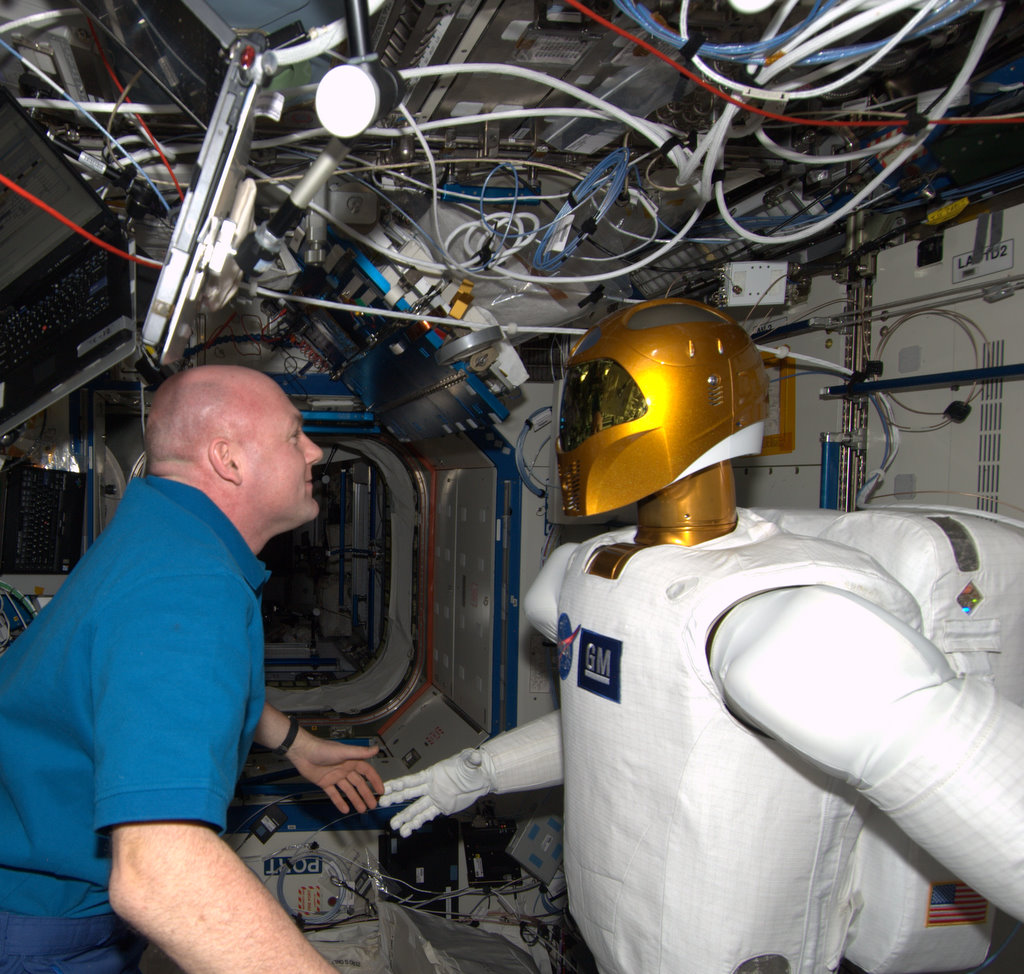
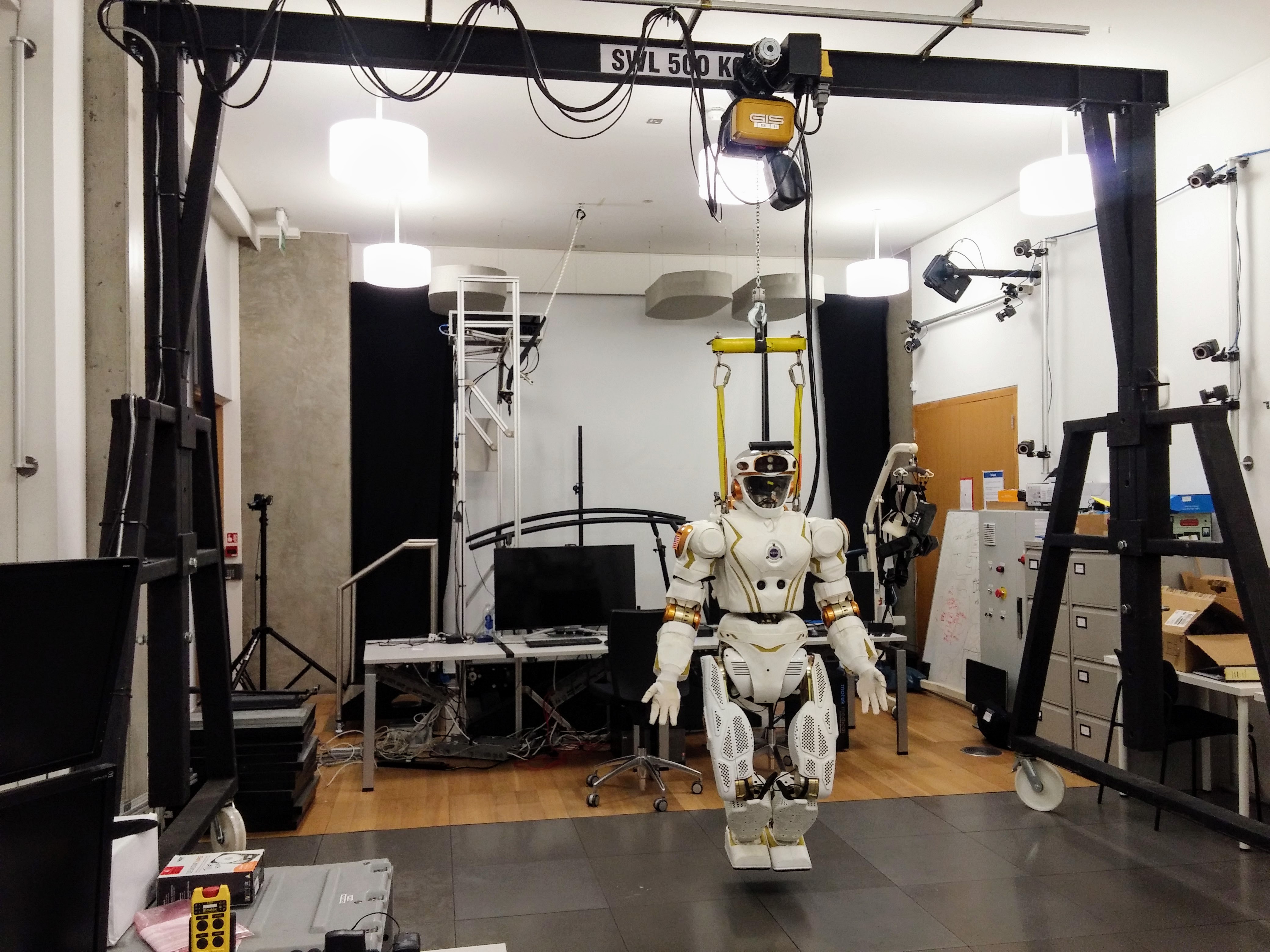
Humanoid Robots

Introduction
Humanoid RobotsCharacteristics:
- Floating base
- Safe human interaction
- Complex environments
- Dynamic environments
- Balance constraints
Introduction
Humanoid Robots
Challenges:
(Some of them...)- Automation
- Bipedal balance
- External factors
- Many degrees-of-freedom
Motivation
Humanoid robots capable of autonomously planning and reaching difficult grasping goals in more realistic, i.e. more complex and dynamic environments.
Problem
State of the Art
Problem
- Engineering (Informatics)
- Robotics and AI
- End-Pose Planning (Whole-Body)
- on Uneven Terrains
Problem
End-Pose PlanningEssential problem in humanoid applications:
- Valid stance locations
- Collision-free reaching configurations
Non-trivial in complex environments.
Serves as the input to walking and motion planners.
Problem
End-Pose Planning
Quadratic
Programming (QP)
Programming (QP)
- Hard constraints
- Slow
Jacobian Inverse Kinematics (IK)
- Soft constraints
- Fast
- Obstacle avoidance is too expensive
- Solvers get stuck in local minima
Related Work
iDRM- Offline stage: iDRM construction
- Online stage: valid end-pose selection
Related Work
Offline stage: sampling.
Related Work
Given a grasping goal, where can the robot stand?
Quadrant of an iDRM.
[YIL+16]
Voxels are colored according to their amount of
collision-free states (green = high, red = low).
collision-free states (green = high, red = low).
Related Work
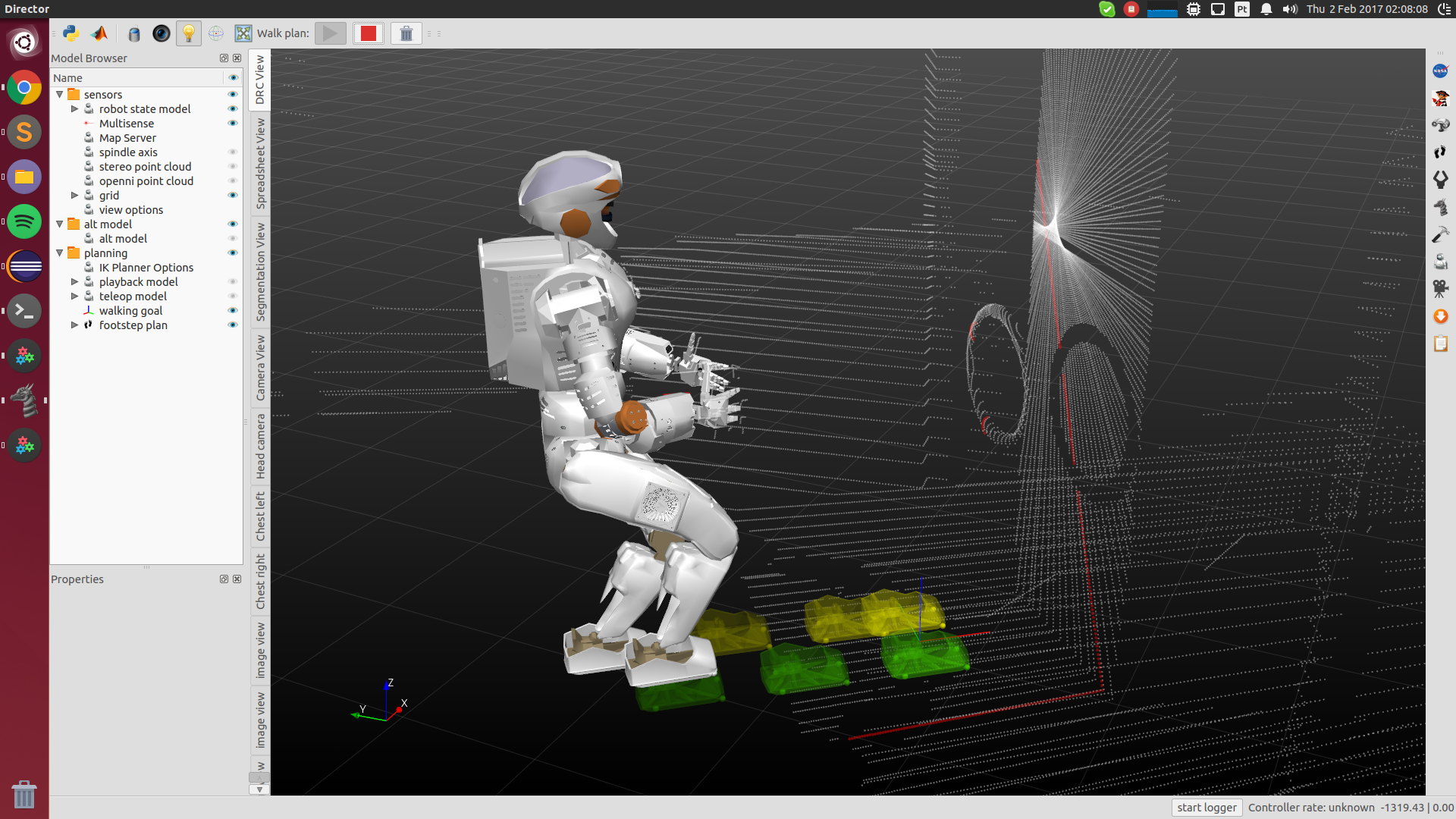
iDRM: System Overview- End-pose planning
- Footstep planning
- Walking execution
- Motion planning (Whole-Body)
- Motion execution
Related Work
1. End-pose planning[YIL+16]
Related Work
2. Footstep planning[YIL+16]
Related Work
2.1. Walking execution[YIL+16]
Related Work
3. Motion planning[YIL+16]
Related Work
Example of an unnatural-looking pose.
Open problems:
- Inclined terrains
- Combinatorial overhead
- Unnatural-looking poses
- Bimanual manipulation
Goals
Enable humanoid robots to autonomously
plan complex end-poses on uneven terrains.
- Extend dataset
- Split dataset in 2: upper-body and lower-body
- Improve samples
- Pseudorandom sampling with constraints for human-like poses
Methodology
- Explore current problems
- Design an approach
- Implement solution
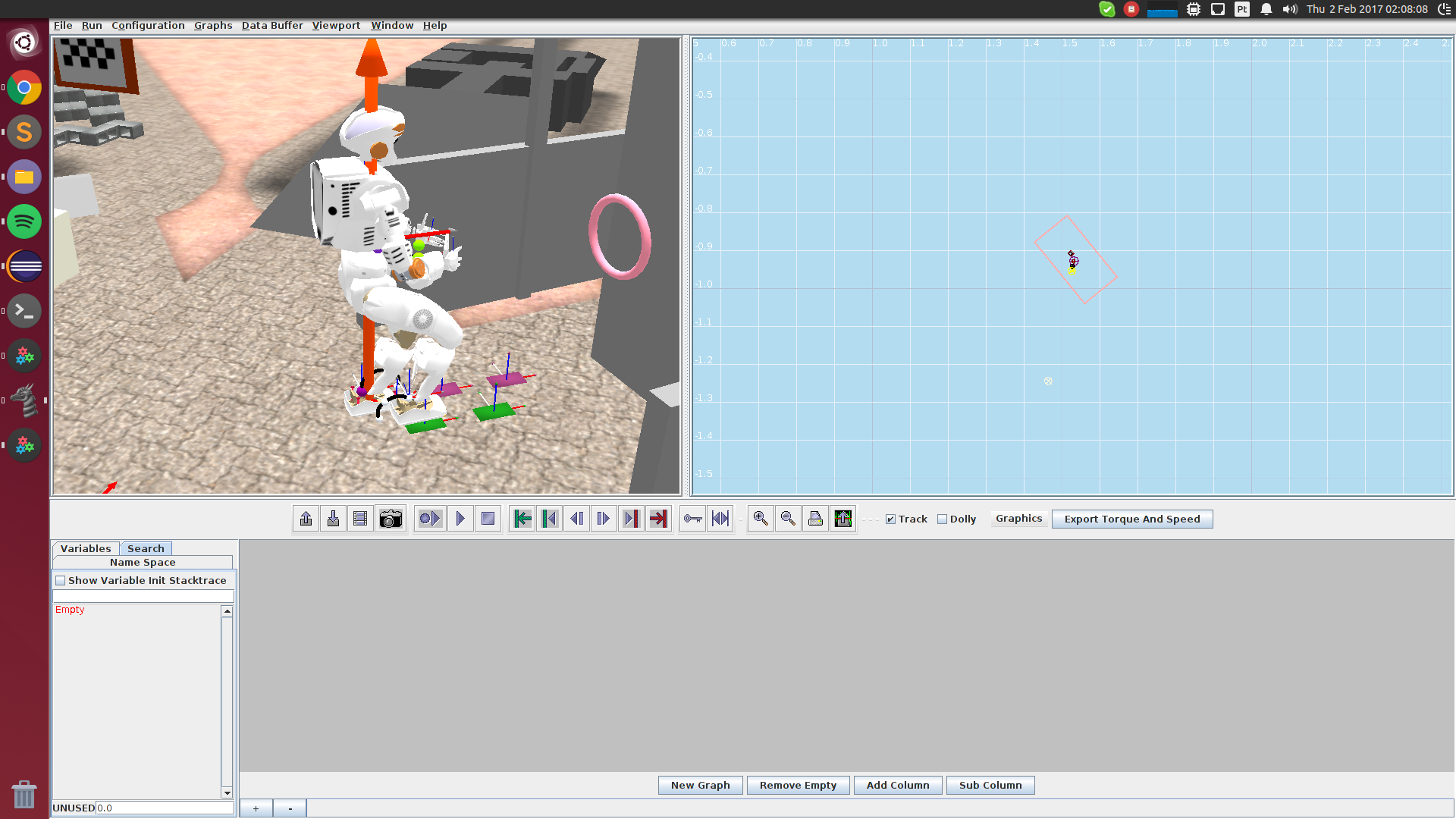
- Simulate
- Test with robot
- Evaluate results
Methodology
Methodology
Work Plan
2017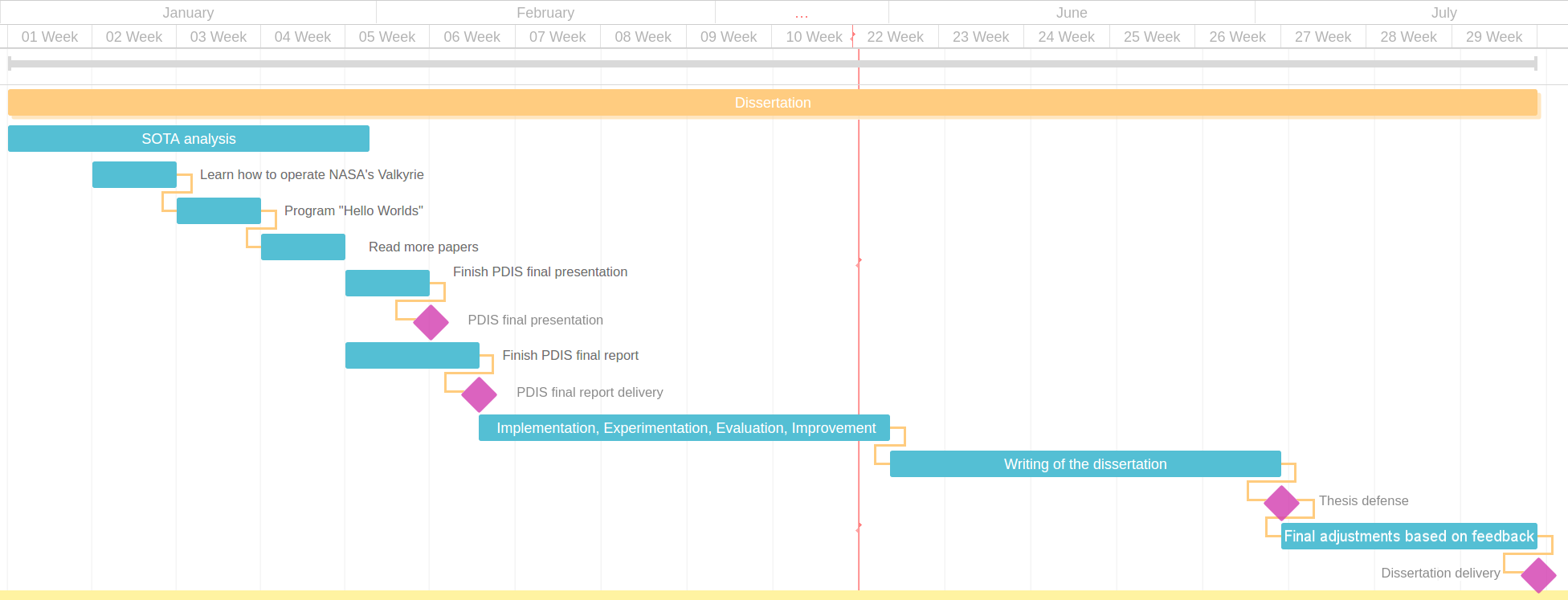
Thank you
Special thanks to Wolfgang Merkt and Yiming Yang for
putting up with me and reviewing this presentation.
References
| [ES14] | Elbanhawi, Mohamed, and Milan Simic. "Sampling-based robot motion planning: A review." IEEE Access 2 (2014): 56-77. |
| [NASA17] | NASA. "Mars planet facts news & images." http://mars.jpl.nasa.gov (accessed January 29, 2017). |
| [PM13] | Pratt, Gill, and Justin Manzo. "The darpa robotics challenge [competitions]." IEEE Robotics & Automation Magazine 20, no. 2 (2013): 10-12. |
| [YIL+16] | Yang, Yiming, Vladimir Ivan, Zhibin Li, Maurice Fallon, and Sethu Vijayakumar. "iDRM: Humanoid motion planning with realtime end-pose selection in complex environments." In Humanoid Robots (Humanoids), 2016 IEEE-RAS 16th International Conference on, pp. 271-278. IEEE, 2016. |
| [YIMV16] | Yang, Yiming, Vladimir Ivan, Wolfgang Merkt, and Sethu Vijayakumar. "Scaling Sampling-based Motion Planning to Humanoid Robots." In ROBIO. IEEE, 2016. |